Imagry, established in 2015, is a computer vision startup focused on deep learning and image recognition. Since 2018, they have specialized in automotive applications by offering autonomous driving software and have developed their own mapless driving system.
Dr. Ilan Shaviv was appointed CTO of Imagry in 2022. He is applying his longtime career in the defense industry and his academic background in estimation and guidance to his new role. He earned a BSc in aerospace engineering from Technion, Haifa, Israel – an institution ranked among the top science and technology research universities worldwide. After graduation, he joined Rafael, a company affiliated with Israel’s defense industry. While working there, he pursued MSc and Ph.D. degrees in aerospace engineering, specializing in estimation and guidance.
“At Rafael, I performed numerous roles in various groundbreaking development projects up to and including serving as a chief system architect,” Dr. Shaviv recalled. “About a year ago, after 28 years at Rafael, with the support of my wife, I decided to search for a new challenge and arrived at Imagry.”
MiniMap & SpaceNet
Dr. Shaviv joined Imagry a few years into their shift to solely developing software for autonomous vehicles. “Our company’s focus narrowed to autonomous vehicles about five years ago,” he said. “As an AI, hardware-agnostic software company, our primary goal is to create the software necessary to autonomously drive passenger cars and buses on public roads.”
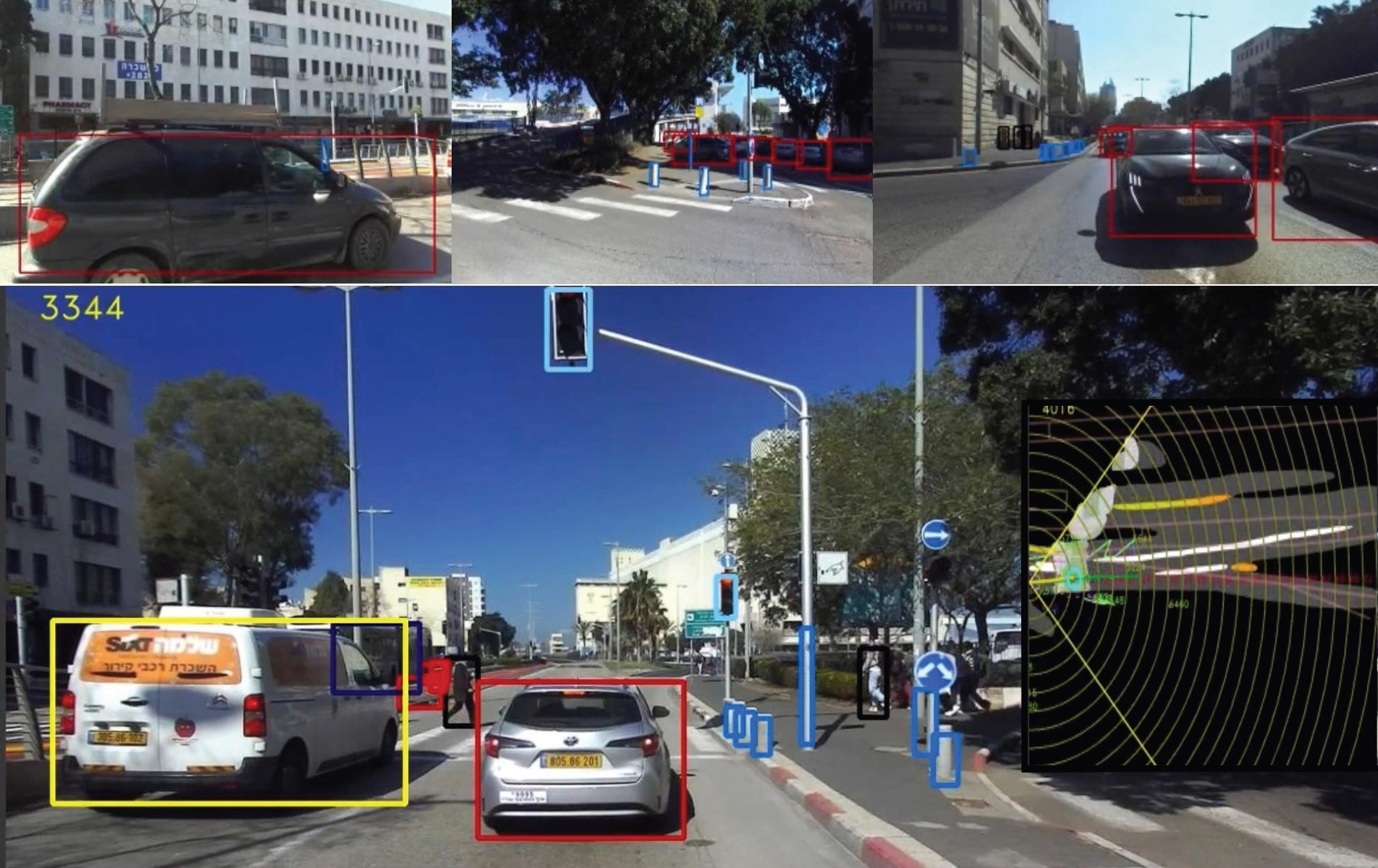
To achieve this, Imagry developed a software stack that uses regular camera feeds to perceive the immediate environment around the vehicle in real-time, creating what is known as a MiniMap. Several deep neural networks process the video feeds from the cameras, resulting in the MiniMap, a perception map that is fed to Imagry’s second software stack called SpaceNet, which handles the motion planning phase. Unlike rule-based approaches, Imagry leverages a neural network approach to motion planning. By imitating human behavior, Imagry teaches its network to drive, producing a path solution to traverse the nearby area covered by the MiniMap.
“This approach of teaching the AI to drive in general and not only in a specific location allows our software stack to drive ‘out-of-the-box’ in new locations the vehicle has never visited,” Dr. Shaviv added. “Just like a human that can get off a plane in a new country, rent a car, and drive.”
Although a software company, Imagry built the necessary hardware to showcase its software stack on the road. They integrated their test system into a passenger vehicle and took it for a drive in downtown Haifa, Israel, an area that’s notoriously challenging to navigate. Over the past three years, in addition to Haifa, they have driven, safely and without any accidents, in San Jose, California; Tempe, Arizona; and Frankfurt, Germany. Imagry was recently offered a unique opportunity to showcase its capabilities in an Israel government-funded project to deploy an autonomous bus on a public road.
“This is a very special occasion, a once-in-a-lifetime event, in which all the stars have aligned,” Dr. Shaviv said. “Technology-wise, we have the capability; hardware-wise, we have cooperation with a bus manufacturer; logistics-wise, we have a public transportation service operator; and lastly, regulation-wise, we have the government – the Ministry of Transportation, Israel Innovation Authority – where all parties are striving for the project’s success.”

Motion Planning & Neural Networks
Humans underestimate the amount of computing our brains do to perceive the environment and then traverse it in order to drive, Dr. Shaviv explained. Perception involves understanding the car’s immediate surroundings, including the road’s location, lanes, crosswalks, and other markings. It requires, he said, identifying traffic lights and their signal colors, reading signs along the road, recognizing the position of other cars and pedestrians, and predicting their movements. Much like for humans, this perception data is achieved solely through visual sensors, specifically cameras.
Also known as path planning, motion planning is an algorithm that produces a path to traverse the immediate surroundings while considering things like the position, motion (including velocity and acceleration), and trajectory of other vehicles and pedestrians. In an intersection, for example, Imagry’s motion planning software creates a path to go straight, turn right, or turn left. It ensures, for example, the vehicle maintains a safe distance when driving alongside parked cars and through other road obstacles, such as construction sites. In contrast to traditional autonomous driving software, Imagry’s approach does not involve encoding rules; rather, they teach a neural network to perform the task.
“The problem we face in autonomous driving is that the world is diverse, and writing specific rules to cope with every possible option is impractical,” Dr. Shaviv said. “The wonderful thing about neural networks is their ability to adapt to situations they have not seen and hence have not practiced navigating. The adaptation is done by producing a solution based on a combination of solutions that the neural network already learned, just like humans do.”
Simplicity & Versatility
This ability to adapt, or generalization capability, is crucial to developing autonomous vehicles. “By applying neural networks to solve every task involved in driving, we ensure that autonomous vehicles can adapt to new situations and not break down when faced with a situation that involves something a little different than what was learned previously,” Dr. Shaviv said. “This ability to generalize is one of the benefits Imagry provides to the autonomous industry.”
As described by Dr. Shaviv, Imagry avoids creating a “big black box” situation by breaking down the larger tasks of perception and motion planning into smaller ones, each governed by a specific neural network. “When something does not work properly, we can dive in and pinpoint the specific faulty neural network and then strengthen it,” he continued. “A complex neural network that handles multiple tasks can become a big black box, making it difficult to identify the source of any issues that may arise.”
Successful Pilot Programs
Imagry has two pilot programs in progress that may interest developers of autonomous cars. Their first is a shuttle bus that will operate in the Sheba medical center in Israel, the biggest medical center in the Middle East. The medical center campus is about 800 dunam (200 acres), about the size of a small village. “What makes the project especially challenging is that the medical center campus is considered an operational zone, and as such, the regular public road rules and regulations are different (that’s not to say they don’t exist),” Dr. Shaviv said.
The second program provides an autonomous bus that can drive on a public road. “This bus will be integrated into an existing bus line in Nahariya, Israel,” Dr. Shaviv continued. “The idea is to use our technology to solve the bus driver shortage problem in Israel, a common problem that Israel shares with the world.”
The Israel Innovative Authority, part of the Israeli government, supports both programs.
Shaviv’s role at Imagry is clear: to lead his engineering team in developing simple, versatile, and scalable autonomous driving software for vehicles of varying sizes for diverse driving situations and environments. No small task, but we imagine he is up for it.

